Bioinspired Vision-based Microflyers
Taking inspiration from biological systems to enhance navigational autonomy of robots flying in confined or cluttered environments.
Adam Klaptocz (EPFL), Antoine Beyeler (EPFL), Rico Möckel (INI)
This project is supervised by Jean-Christophe Zufferey (EPFL), Shih-Chii Liu (INI), and Dario Floreano (EPFL)
This project is funded by the Swiss National Science Foundation
The goal of this project is to develop control strategies and neuromorphic chips for autonomous microflyers capable of navigating in confined or cluttered areas such as houses or small built environments using vision as main source of information.
Flying in such environements implies a number of challenges that are not found in high-altitude, GPS-based, unmanned aerial vehicles (UAVs). These include small size and slow speed for maneuverability, light weight to stay airborne, low-consumption electronics, and smart sensing and control. We believe that neuromorphic vision chips and bio-inspired control strategies are very promising methods to solve this challenge. The project is articulated along three, tightly integrated, research directions:
We plan to take inspiration from flying insects both for the design of the vision chips and for the choice of control architectures. Instead, for the design of the microflyers, we intend to develop innovative solutions and improvements over existing micro-helicopter and micro-airplanes. Our final goal is to better understand the minimal set of mechanisms and strategies required to fly in confined environments by testing theoretical and neuro-physiological models in our microflyers. |

|
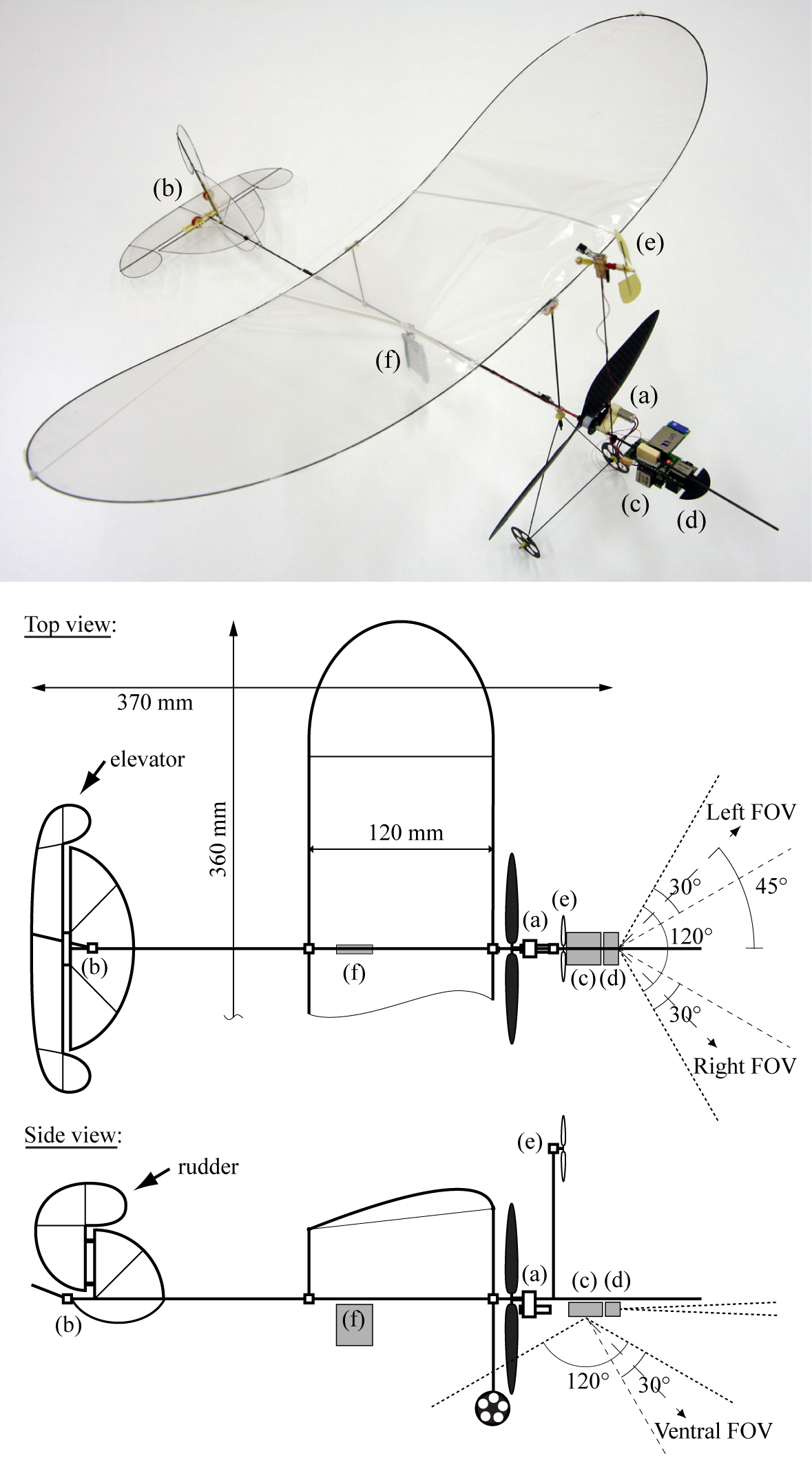
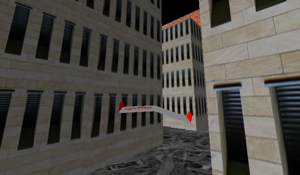
A 10-gram microflyer that flies autonomously in a 7x6m test arena The purpose of this ongoing experiment is to demonstrate autonomous steering of a 10-gram microflyer (the MC2) in a square room with different kind of textures on the walls (the Holodeck). This will first be achieved with conventional linear cameras before migrating towards aVLSI sensors. Video Clips
Related Publications301 Moved Permanently |
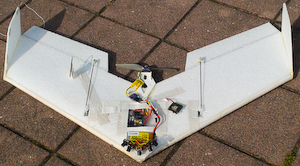
Optic-flow-based control strategiesMost current UAV/MAV autopilots rely on estimation of the three positional coordinates and the three angular coordinates by fusing GPS and Inertial Measurement Unit (IMU) information in order to maintain control the stability and trajectory in obstacle-free space. This prevents the use of UAV/MAVs in cluttered environments such as cities, mountain regions, or indoors, which demand for lightweight vehicles capable of continuously steering among obstacles without GPS signal. In this project, we develop a novel method, called optiPilot (patent pending) for near-obstacle flight control that uses optic flow and does not require estimation of positional and angular coordinates. It consists of directly mapping optic flow estimates taken in various directions around the aircraft translation vector into control signals for roll and pitch regulation by means of two weighted sums, similarly to neural matched filters found in flying insects. This method is capable of stabilising both altitude and attitude and of steering through cluttered environments. It is applicable to any flying vehicle whose translation vector can be assumed to be aligned with its longitudinal axis, such as fixed-wing aircraft or helicopters in translational flight. This method can be implemented with various kinds of optic-flow detectors as front end. Typical examples include standard CMOS cameras with off-board image processing, aVLSI motion chips (see next section), or optical mouse sensors (see figure on the right, top one). Video Clips
Related Publications301 Moved Permanently |
|
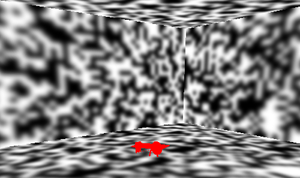
| aVLSI optic-flow detectors (developed at INI)The extraction of motion from optic flow is very expensive from the computational point of view and turns out to be a great challenge in embedded systems: A changing noisy view of the environment is shown to an array of photoreceptors and is used to detect motion. To get a good estimation of the motion in front of a microflyer, computation on the signals extracted from the array of photoreceptors should be in parallel to make sure that necessary data is not lost. For a microflyer we also have constrains like low power consumption and low weight. That is why aVLSI (analog very large scale integrated) motion chips ideally fit for microflyers. Related Publications301 Moved Permanently |

Related LinksOther Bio-inspired Vision-based Flying Robots
Other Miniature and Slow Flying Robots
Other Indoor Flying Robots
Biological Studies of Flying Insects
Miscellaneous
|
People Involved in this Project
Visiting Students
Master Projects
Semester Projects
Student Project Proposals
|
Partners
|
[26 May 2010] Short TV show presenting several of our flying robots including the microflyer and optiPilot prototypes. Also featured in prime time Swiss TV News (TSR). |
||
[3-8 May 2010] J.-C. Zufferey presents a paper on how to couple the optiPilot control strategy with GPS guidance at ICRA'10 in Anchorage. |
||
[22 October 2007] This project is presented at Swissnex, San Francisco. This article from swissinfo describe our tour in California. |
||
[26 May 2010] Short TV show presenting several of our flying robots including the microflyer and optiPilot prototypes. Also featured in prime time Swiss TV News (TSR). |
||