What is kevobot?
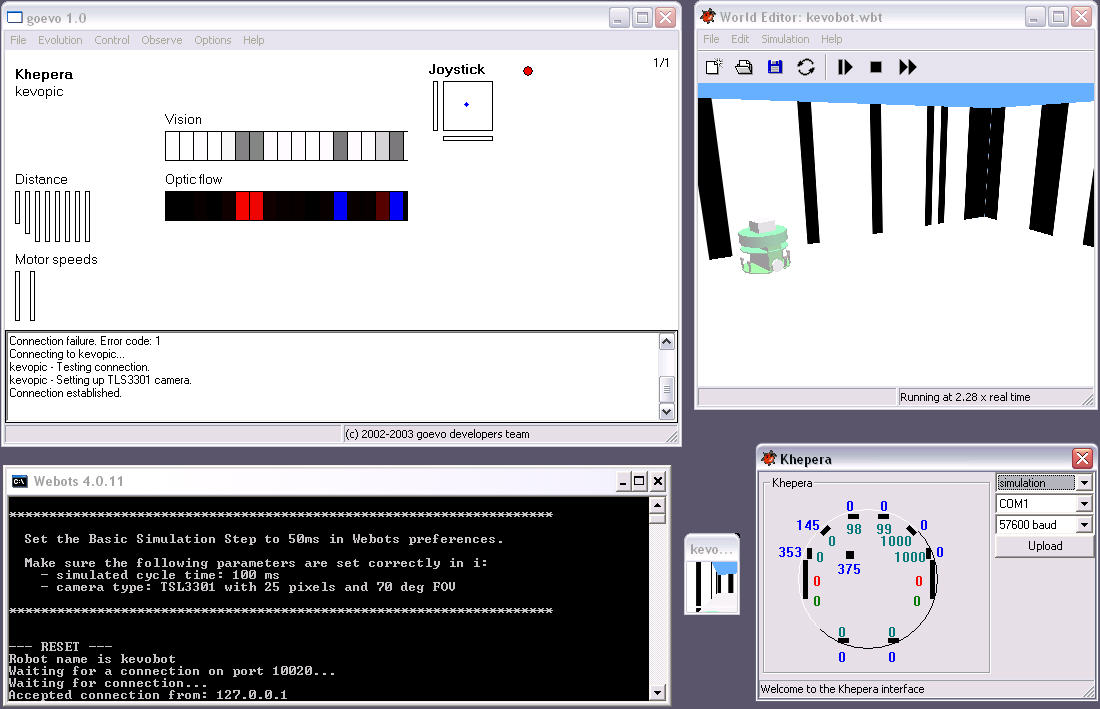
The kevobot (Khepera-kevopic simulator for Webots) package contains the so-called controller written in C and the world (physical description of the robot and its environment in VRML) for Webots. The controller is responsible for enabling and retrieving sensor values from Webots, managing the simulation by ordering simulation steps, and providing a TCP/IP server for goevo (see the screenshot below), thus replacing a real Khepera (equipped or not with kevopic). Webots 4 by Cyberbotics is a versatile 3D mobile robot simulator with an integrated physics engine. The simulator is compatible -among others- with Windows and Linux.
In the current version, kevobot is Khepera compatible in the sense it provides full access to IR sensors, wheel encoders, motor control. Moreover, it possible to enable either a K213 turret or a kevopic with a TSL3301 to obtain 1D visual input.
Note: in order to compile and run kevobot, it is mandatory to have Webots 4 installed on your computer.