Bio-inspired Vision-based Flying Robots (Completed)
Applying bio-inspired methods to indoor flying
robots for autonomous vision-based navigation.
*** A follow-up project can be found at this address. ***
Robotic vision opens the question of how
to use efficiently and in real time the large
amount of information gathered through the receptors. The
mainstream approach to computer vision based on a sequence
of pre-processing, segmentation, object extraction, and
pattern recognition of each single image is not viable
for behavioral systems that must respond very quickly
in their environments. Behavioral and energetic autonomy
will benefit from light-weight vision systems tuned to
simple features of the environment.
In this project, we explore an approach
whereby robust vision-based behaviors emerge out of the
coordination of several visuo-motor components that can directly
link simple visual features to motor commands. Biological
inspiration is taken from insect vision and evolutionary
algorithms are used to evolve efficient neural networks.
The resulting controllers select, develop, and exploit
visuo-motor components that are tailored to the information
relevant for the particular environment, robot morphology,
and behavior. |
|
 |
Overview
Publications
301 Moved Permanently
301 Moved Permanently
CloudFront
|
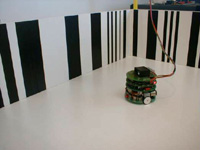

Khepera in its arena with randomly arranged
b/w stripes
|
|
Evolving Neural Network
for Vision-based Navigation
The story started with a non-flying robot. Floreano et al.
(2001) demonstrated the ability of an evolved spiking neural
network to control a Khepera for
smooth vision-based wandering in an arena with randomly sized
black and white patterns on the walls. The best individuals
were capable of moving forward and avoiding walls very reliably.
However, the complexity of the dynamics of this terrestrial
robot is much simpler than that of flying devices, and we are
currently exploring whether that approach can be extended to
flying robots.
The Khepera equipped
with one of the best evolved neural network has been running
in an exposition at the Villa-Reuge during
8 months.
Video Clips
- Autonomous individual
(equipped with kevopic
board and embedded neural network) that evolved backward
movement whenever a frontal obstacle is too close (above
view: MPG, 12MB;
close view: MPG,
6MB; 25.02.04)
- One of the best individuals (AVI,
7.3MB, 05.2002)
Related Publications
301 Moved Permanently
301 Moved Permanently
CloudFront
|
Evolution
Applied to Physical Flying Robots: the Blimp
Evolving aerial robots brings a new set of challenges. The
major issues of developing (evolving, e.g. using goevo)
a control system for an airship, with respect to a wheeled
robot, are (1) the extension to three dimensions, (2) the impossibility
to communicate to a computer via cables, (3) the difficulty
of defining and measuring performance, and (4) the more complex
dynamics. For example, while the Khepera is controlled in speed,
the blimp is controlled in thrust (speed derivative) and can
slip sideways. Moreover, inertial and aerodynamic forces play
a major role. Artificial evolution is a promising method to
automatically develop control systems for complex robots, but
it requires machines that are capable of moving for long periods
of time without human intervention and withstanding shocks.
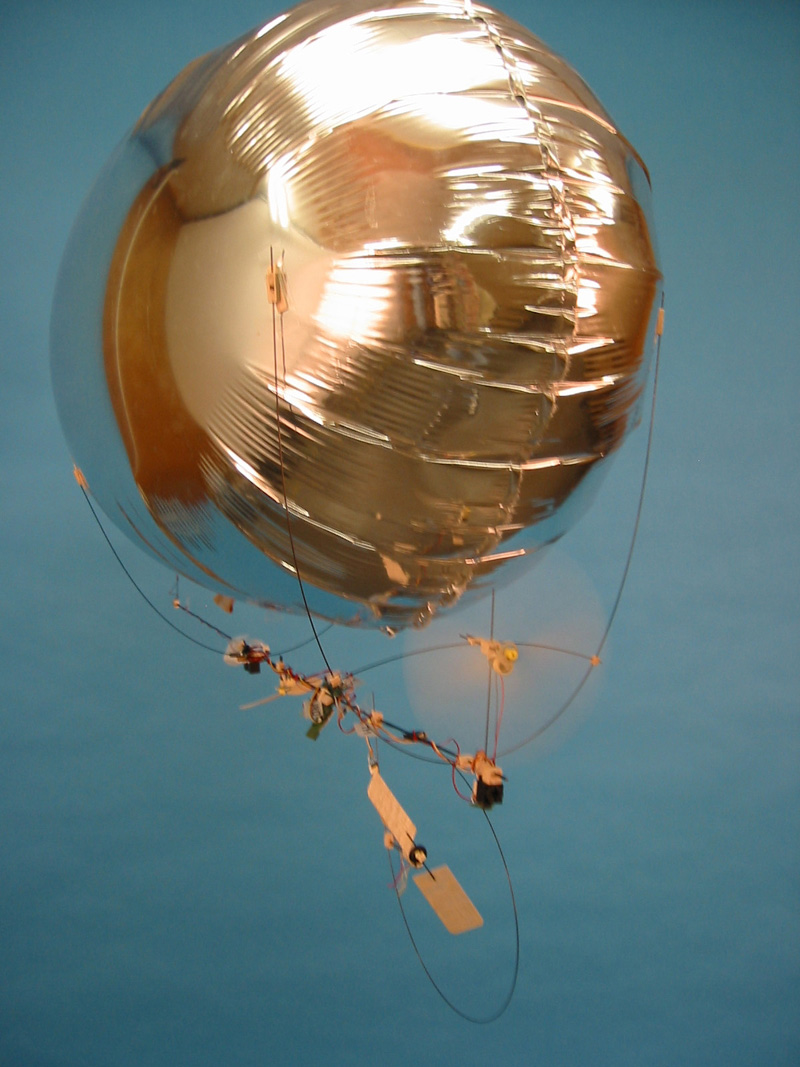
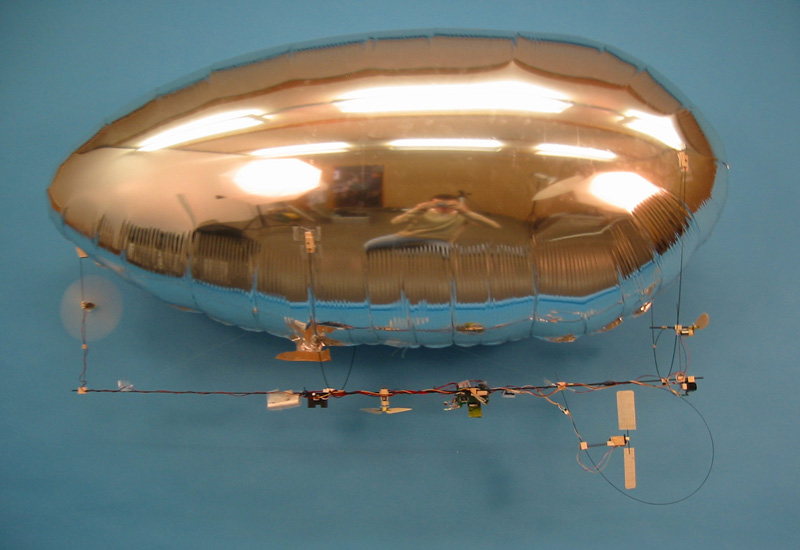
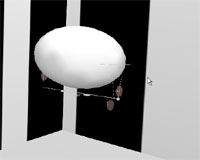
Those requirements led us to the development of the Blimp
2 shown in the pictures. All onboard electronic components
are connected to a microcontroller with a wireless connection to
a desktop computer. The bidirectional digital communication
with the desktop computer is handled by a Bluetooth
radio module, allowing more than 15 m range. The energy
is provided by a Li-Poly battery, which lasts more than 3 hours
under normal operation, during evolutionary runs with goevo.
For now, a simple linear camera is attached in front
of the gondola, pointing forward. We are currently working
on other kinds of micro-cameras. Other embedded sensors are
an anemometer for fitness evaluation, a MEMS gyro for yaw rotation
speed estimate, and a distance sensors for altitude measurements.
Video Clips
- Blimp
2b (evolved in simulation and
tested in reality)
- Autonomous run of the best individual evolved
in simulation (41st generation), tested in
reality (MPG,
7MB)
- The same individual is able to cope with
obstacle it never saw during evolution (MPG,
6.6MB; MPG,
6.8MB)
- This individual is also able to go backward
whenever facing an obstacle (MPG,
3MB; MPG,
9MB)
- Blimp 2b (slightly larger envelope, addition
of a yaw axis MEMS gyro)
- Autonomous run of the best individual
of the 24th generation (MPG,
3.3MB, 09.2003)
- Same individual demonstrating its capability
of getting out from stuck situations (MPG,
2.4MB, 09.2003)
- Blimp 2 (second version, fully rearranged
architecture)
- Random selected individual of the first generation
(MPG, 1.6MB,
04.2003)
- Autonomous run of the best individual of the 20th
generation (MPG,
13MB, 04.2003)
- What the blimp "sees" (AVI,
0.7MB, 04.2003)
- Blimp 1 (first version):
- Human piloted tour in a large environment (AVI,
3.7MB, 05.2002)
- Human piloted tour (AVI,
7.5MB, 03.2002)
- What the blimp "sees" with its horizontal
camera during moving in its environment (AVI,
400kB)
Related Publications
301 Moved Permanently
301 Moved Permanently
CloudFront
|


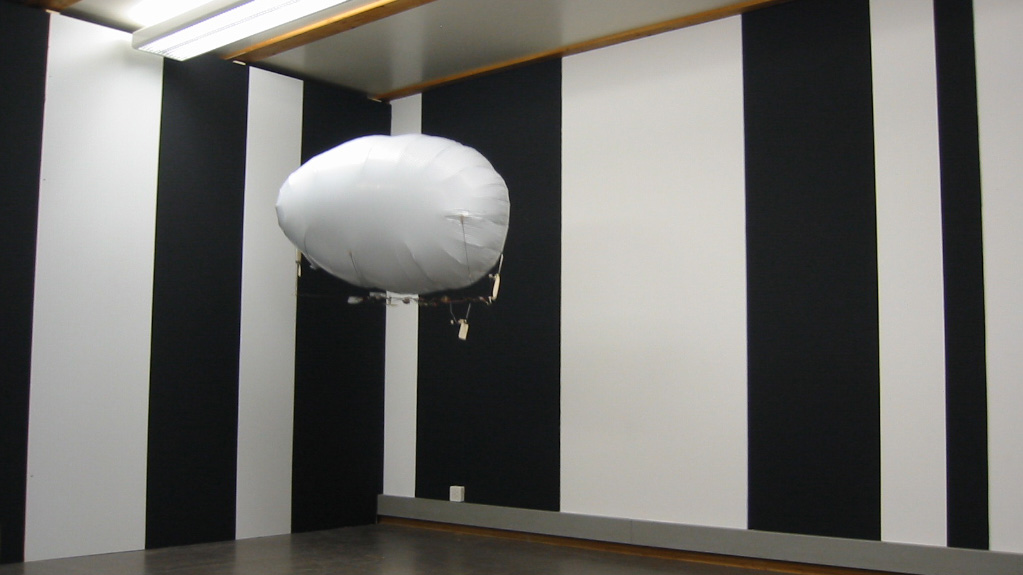
Blimp 2 (100g)

Blimp 2b in its environment
|
|
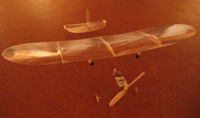 
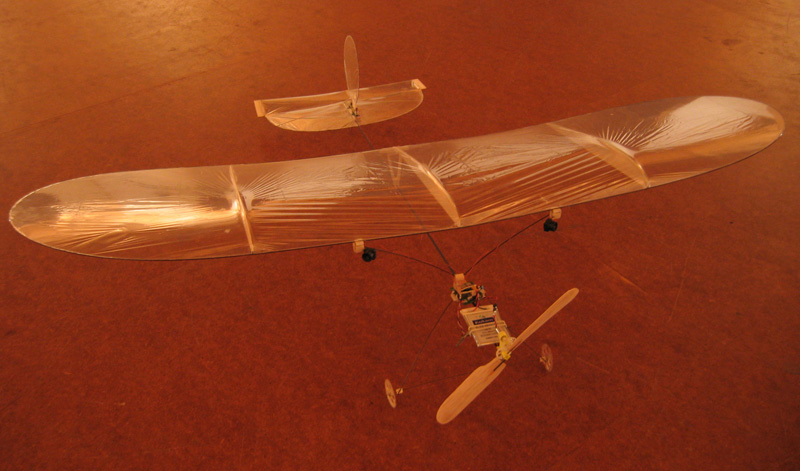
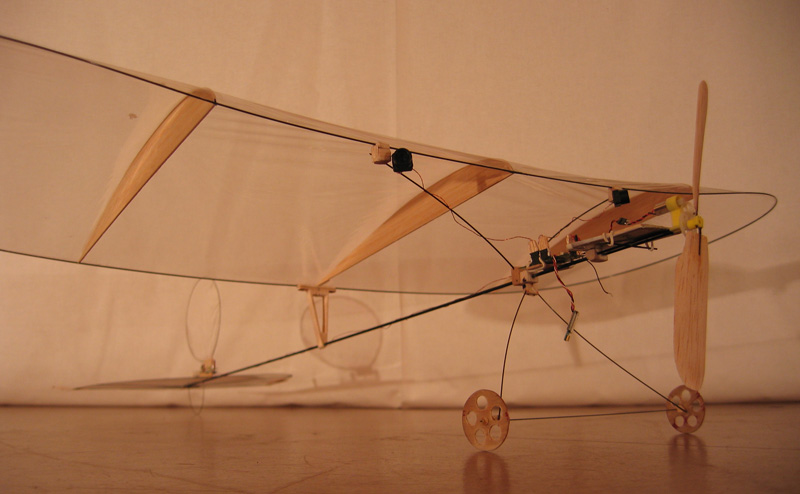
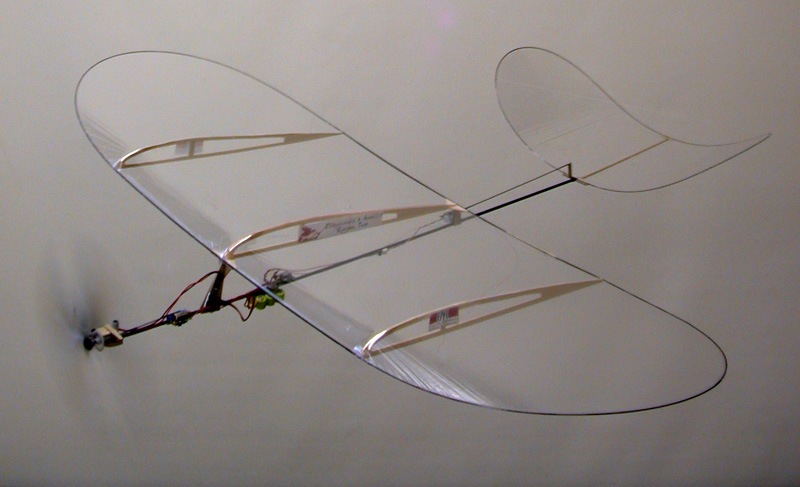
Model F2 (2004, 30g,
1.1m/s)

Non-robotic models by DIDEL:
Celine (2003,
10g, 1m/s)
miniCeline (2004,
6g, 0.86m/s, not shown)

Model C4 (2001, 50g,
1.4m/s)
|
|
Final
Goal: an Autonomous Vision-based Indoor Plane
In order to further demonstrate this concept,
we chose the indoor slow flyers as a well-suited test-bed because
of the need for very fast reactions, low power consumption,
and extremely lightweight equipment. The possibility
of flying indoor simplifies the experiments by avoiding the
effect of the wind and the dependence on the weather and allows
for modifying as needed the visual environment. Our new model
F2 (picture on the left) has the following characteristics:
bi-directional digital communication using Bluetooth,
overall weight of 30 g, 80 cm wing span, more
than 20 minutes autonomy, 1.1 m/s minimum flight speed,
minimum space for flying of about 7x7 meters, 2 or 3 linear
cameras, 1 gyro, 1 2-axis accelerometer).
With respect to the Blimp, that kind of airplanes are slightly
faster and have 2 more degrees of freedom (pitch and roll). Moreover,
they are not able to be evolved in a room. Therefore are we currently
working on a robotic flight simulator (see
below). Both physical and simulated indoor slow flyers are
compatible with goevo.
**Initial
experiments using optic-flow without evolutionary methods have
been carried out to demonstrate vision-based obstacle avoidance
with a 30-gram airplane flying at about 2m/s (model F2, see
pictures on the left). The experimental environment is a 16x16m
arena equipped with textured walls.
The behavior of the plane
is inspired from that of flies (see Tammero
and Dickinson,
The Journal of Experimental Biology 205, pp. 327-343, 2002).
The ultra-light aircraft flies mainly in straight motion while
using gyroscopic information to counteract small perturbations
and keep its heading. Whenever frontal optic-flow expansion
exceeds a fixed threshold it engages a saccade (quick turning
action), which consists in a predefined series of motor commands
in order to quickly turn away from the obstacle (see
video below). The direction (left or right) of the saccade
is chosen such to turn away from the side experiencing higher
optic-flow (corresponding to closer objects).
Two horizontal
linear cameras are mounted on the wing leading edge in order
to feed the optic-flow estimation algorithm running in the
embedded 8-bit microcontroller. The heading control including
obstacle avoidance is thus truly autonomous, while an operator
only controls the altitude (pitch) of the airplane via a joystick
and a Bluetooth communication link.
So far, the 30-gram robot has been able to fly
collision-free for more than 4 minutes without any intervention
regarding its heading. Only 20% of the time was engaged in
saccades, which indicates that the plane flew always
in straight trajectories except when very close to the walls.
During those 4 minutes, the aerial robot generated 50 saccades,
and covered about 300m in straight motion.
Seethis
poster for more information.
Video Clips
- Model
F2 (30g, min. 1.1m/s, Bluetooth, 2-3 linear cameras,
1 gyro, 1 2-axis accelerometer)
- Experiment of autonomous steering** (MPG, 26MB, 16.07.2004)
- Model F2 presentation (MPG, 19MB, 16.07.2004)
- Model "celine" (10g, 1m/s, IR-controlled,
no sensors)
- Remote
controlled flight of the 10g "celine" model
in an 7x4 m hotel room (MPG,
8MB, 10.2003)
- Other great videoclips of the "celine" can
be downloaded from this
page
- Model C4 and previous (50g, 1.4m/s, radio-controlled,
no sensors)
- Full length video clip of this model C4 and the previous
one (B) in flight (MPG,
38.7MB, 2001)
-
Some extracts from the above video
clip: Model C4, part I ( AVI,
2.5MB, 2001), part II ( AVI,
2.5MB, 2001), part III, with a person walking
behind the flying aircraft ( AVI,
4.2MB, 2001)
-
Full lenght video of the little television
report at the TV-news ( MPG,
27.7MB, 2001)
Related Publications
301 Moved Permanently
301 Moved Permanently
CloudFront
|
Robotic
Flight Simulator
A flight simulator based on Webots4 helps
us to speed up evolutionary runs and rapidly (up to 10x faster)
test new ideas. Using OpenGL and ODE (Open Dynamics Engine),
Webots4 is able to accurately simulate 3D motion with physical
effects like gravity, inertia, shocks, friction. Our blimp
dynamical model includes buoyancy, drag, Coriolis
and added mass effects (cf. Webots
official distribution for a simplified example of this
model). So far, we were able to demonstrate very good behavioral
correspondence between simulated Blimp 2b and its physical
counterpart (see movies below) when evolved with goevo.
At the moment of writing, a simple model of our indoor
slow flyer is under development. Our plan is to
have evolution taking place in simulation and the best-evolved
controllers being used to form a small population to be incrementally
evolved on the physical airplane with human assistance in
case of imminent collision. However, we anticipate that evolved
neural controllers will not transfer very well because the
difference between a simulated flyer and a physical one is
likely to be quite large. This issue will probably be approached
by evolving hebbian-like synaptic plasticity, which we have
shown to support fast self-adaptation to changing environments
(cf. Urzelai
and Floreano, 2000).
Video Clips
- Blimp
2b in simulation
- Autonomous run of on of the best evolved
individual. Fitness is only forward speed.
(MPG,
5.6MB, 21.12.2003)
- Autonomous run of on of the best evolved
individual. Fitness is forward speed only
when far from walls. (MPG,
2.9MB, 21.12.2003)
Related Publications
301 Moved Permanently
301 Moved Permanently
CloudFront
|
Blimp 2b in Webots
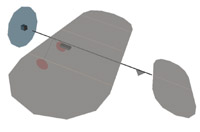
C4 in Webots
|
|
People Involved in this
Project
- Prof. Dario Floreano:
head of the lab and main advisor.
- DR. CNRS Franceschini,
Prof. Siegwart and
Prof. Nicoud are
member of the thesis comitee.
- Cyril Halter has been strongly involved in the development
of the indoor slow flyers, especially for the aerodynamics
and the building of the prototypes.
- Dr.
Jörg Kramer and Dr.
Shih-Chii Liu (INI)
for the design of aVLSI vision chips.
- André Guignard helped
with several micro-mechanical realizations.
- George Vaucher (ACORT)
for some PCB design and delicate BGA chip soldering
Visiting Students
Diploma Projects
- Alexis Guanella: Flight Simulator for Robotic Indoor Slow
Flyers (winter 2003-04)
- Emanuele Dati: New Sensors for Evolutionary Blimp 2 (winter
2003-04)
- Antoine Beyeler: redesign of the blimp mainboard (winter
2002-03)
- Tancredi Merenda: realization of the first blimp setup
(winter 2001-02)
Semester Projects
- Yannick Fournier: miniature CMOS cameras for indoor slow
flyer (summer 2003)
- Alexis Guanella: flying robot simulator (summer 2003)
- Yves Linder: miniature 2D cameras for indoor slow flyer
(winter 2002-03)
- Michael Bonani: development of a Bluetooth radio module
for the indoor slow flyer (summer 2002)
- Alexandre Goy: design and realization of a biomimetic vision
system (summer 2002)
|
|
|
 |
|
|
|
More recent event anouncements can be found on this follow-up project webpage.
[19 March - 19 June 2005] Exhibition
of our artificially evolved Blimp at Musée Jenisch in Vevey, Switzerland.
[14 February 2005] Prof.
Srinivasan gives a talk at EPFL about honeybee
vision, navigation, "cognition" and applications to
autonomous vehicules.
[October 2004] We are technical
partner for an artistic
exhibition with blimps by knowbotic
research.
[18 June 2004] Seminar
by DR. Franceschini about insect-inspired control of micro
aircrafts.
[28 May 2004] The
fist Flying
Robots Contest at EPFL is based on blimp
plateforms and will take place within the Smartrob
contest.
[2 February 2004] Seminar
about indoor flying robots at Robopoly.
[17 December
2003] The fist Flying
Robots Contest at EPFL has officially started
with 5 teams of 3-4 people. Each team received
a subpart of the equipment we developped for
the Blimp 2.
[16 October 2003] Conference about
this project "Bio-inspired Flying Robots", followed
by demonstrations at the "espace
abstract", Rue de Genève 19, Lausanne.
[2-4 May 2003] Portes
ouvertes du 150e: démontration interactive du Blimp. Couloir
du CE, vers la salle polyvalente de l'EPFL.
[11 January 2003] Demonstration
at "Robots en ballade" in Pully, Switzerland.
[26 July 2001] Demonstration of
our models (B, C and GyroRover) and some of Mr. Szymanski (blimp,
mouse) in the salle polyvalente EPFL.
|
|
|
|
|
|
|