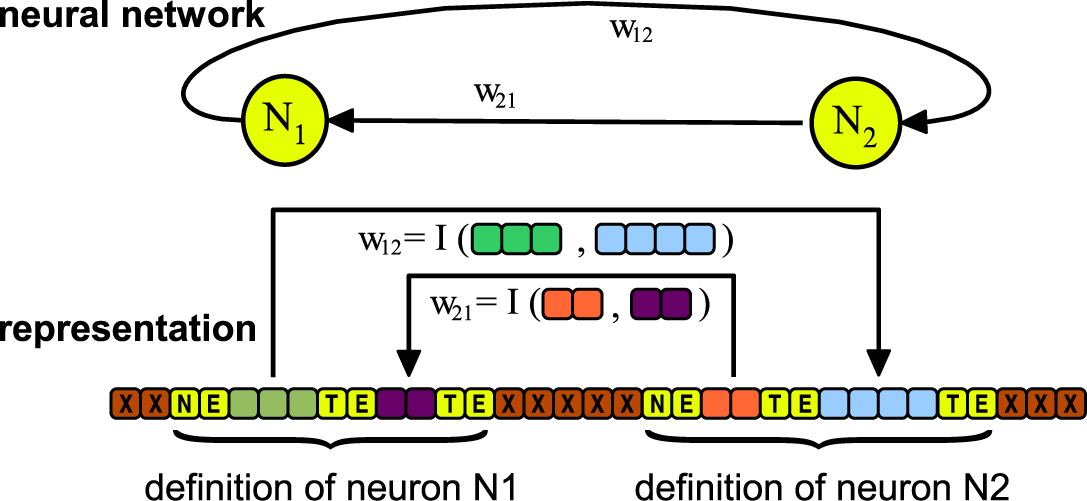
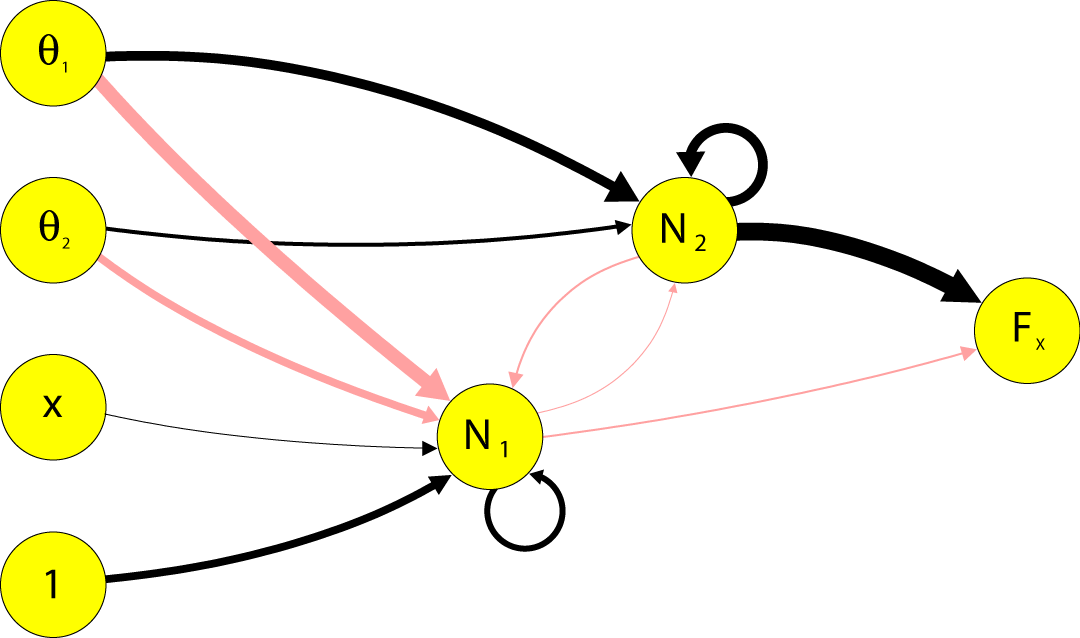
Neuroevolution with Analog Genetic EncodingEvolution of Complexity in Neural NetworksPeter Dürr, Claudio Mattiussi, Dario FloreanoThe evolution of artificial neural networks (ANNs) is often used to tackle difficult control problems. There are different approaches to the encoding of neural networks in artificial genomes. Analog Genetic Encoding (AGE) suits very well to this problem. So far, Analog Genetic Encoding has been applied to different problems of neuroevolution, amongst others to a standard benchmark problem. It has been shown that the performance of the algorithm is equivalent or superior to some of the most powerful algorithms for neuroevolution in the literature. Encoding Neural NetworksNeurons can be represented as symbolic devices with two associated terminal sequences: one for the output terminal and one for the input terminal. The device extraction process obtains them from the genome by assigning the sequences of characters between the device token (“NE”) and the terminal tokens (“TE”) to the respective terminal. The terminal sequences of the different neurons are then used to determine the synaptic weights of the network. The interaction map I(s1, s2) assigns a weight to a pair of sequences, so that we can for example calculate w11 = I(s11, s12). The entire weight matrix can be calculated by doing this for all pairs of terminal sequences in the network.
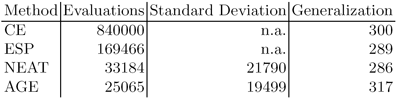
A BenchmarkIn order to compare the different approaches in neuroevolution on a practical rather than a purely theoretical level, a benchmark test is needed. Stanley and Miikkulainen [1] compare the results of the some common neuroevolution methods using the double pole balancing problem with no velocity information (DPNV).
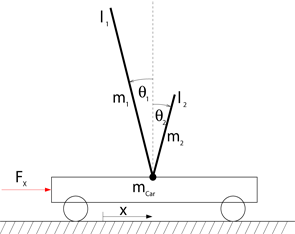
The DPNV benchmark setup consits of a car with one degree of freedom, on which two poles of different lengths are mounted (see [1] for the details). Based on the measured values of the joint angles and the position of the car, the controller is required to balance both of the poles by applying a force to the car.
The results obtained here show that it is possible to use AGE to evolve neural networks for a difficult control task. For more details, please check our paper. References[1] Stanley, K.O., Miikkulainen, R.: Evolving neural networks through augmenting topologies. Evolutionary Computation 10(2) (2002) 99–127 [2] Gruau,F., Whitley, D., Pyeatt, L.: A comparison between cellular encoding and direct encoding for genetic neural networks. Genetic Programming 1996: Proceedings of the First Annual Conference (1996) 81–89 [3] Gomez, F. J., Miikkulainen, R.: Solving non-markovian control tasks with neuroevolution. Proceedings of the International Joint Conference on Artificial Intelligence (1999) 1356–1361 PublicationsP. Dürr, C. Mattiussi, and D. Floreano. Neuroevolution with Analog Genetic Encoding. In PPSN 2006, 2006.[ Details | Link | Full Text ] |
|