|
The conditions for the emergence of communication
were explored in experiments where two parameters were monitored for
their influence on the emergence of communication (see Fig. 1, left):
1. Genetic relatedness within a group of robots (homogeneous, r=1, vs. heterogeneous, r=0, colonies)
2. Level of evolutionary selection (individual or group)
Our results show that honest communication
evolves in three of the four tested conditions, thereby increasing
fitness compared to a baseline experiment, where no blue light was
allowed (see Fig. 1, right). The robots evolved two different stable
communication strategies, which were not equally efficient: In the
first, they signalled when by the food, whereby receivers evolved an
attraction to blue light (Fig. 2, left). In the second strategy, less
efficient strategy, signallers emitted light by the poison, while
receivers were repelled by blue light (Fig. 2, right). This shows that
evolved communication systems need not be optimal in order to be stable.
When agents were unrelated and selected
individually, we observed that communication reduced the fitness of the
groups. Further investigation revealed that this was caused by the
spread of deceptive communication. Due to the large amount of
competition between individuals, it was in the signallers’ best
interest to reduce the fitness of receivers. This was done by
signalling far from the food, given that individuals were attracted to
blue light. One might expect that this would lead receivers to cease to
be attracted to blue light. However, this does not occur. The receiving
strategy is very stable, in conjunction with the deceptive signalling
strategy.
Our hypothesis is that the stability of deceptive communication is due to a large
amount of noise in the selection process. Receivers remain attracted to
blue light because there are always some signallers in the population
that signal by the food. Thus, there was always enough blue light by
the food to make it worth following. These results are currently under investigation.
In conclusion, we show that in order for honest communication to
evolve, either genetic relatedness or group-level selection is needed.
Furthermore, we show that the use of realistic models can lead to
dynamics (such as the stability of deceptive communication) that one
would not observe in simplified mathematical or game-theoretical models.
|
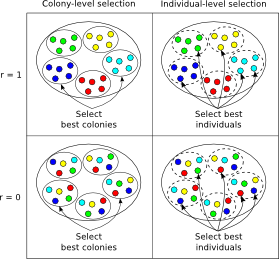 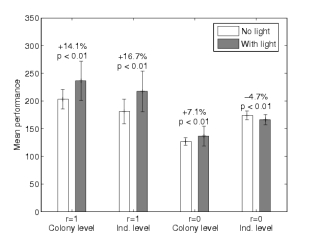
Fig. 1. Left: Four conditions tested in our experiments.
Right: Comparison of mean performance with and without communication in
the four cases.
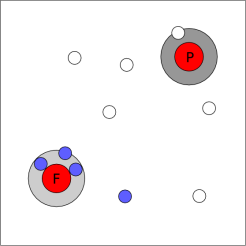 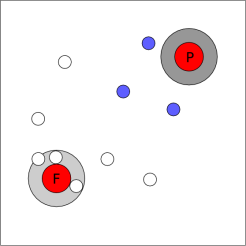
Fig. 2. Left: Evolved food signalling strategy. Right: Evolved poison signalling strategy.
|