 Big Picture
Big Picture
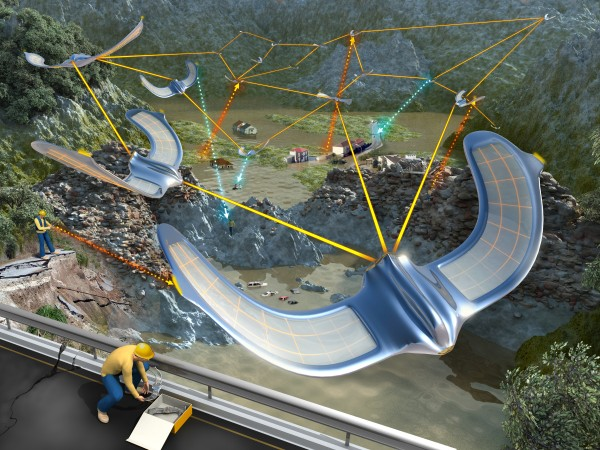
The SMAVNET project aims at developing swarms of flying robots that can be deployed in disaster areas to rapidly create communication networks for rescuers. Flying robots are interesting for such applications because they are fast, can easily overcome difficult terrain, and benefit from line-of-sight communication.
To make aerial swarming a reality, robots and controllers need to be made as simple as possible.
From a hardware perspective, robots are designed to be robust, safe, light-weight and low-cost. Furthermore, protocols and human-swarm interfaces are developed to allow non-experts to easily and safely operate large groups of robots.
From a software perspective, controllers allow flying robots to work together. For swarming, robots react to wireless communication with neighboring robots or rescuers (communication-based behaviors). Using communication as a sensor is interesting because most flying robots are generally equipped with off-the-shelf radio modules that are low-cost, light-weight and relatively long-range. Furthermore, this strategy alleviates the need for position which is required for all existing aerial swarm algorithms and typically requires using sensors that depend on the environment (GPS, cameras) or are expensive and heavy (lasers, radars).
 Robot
Robot
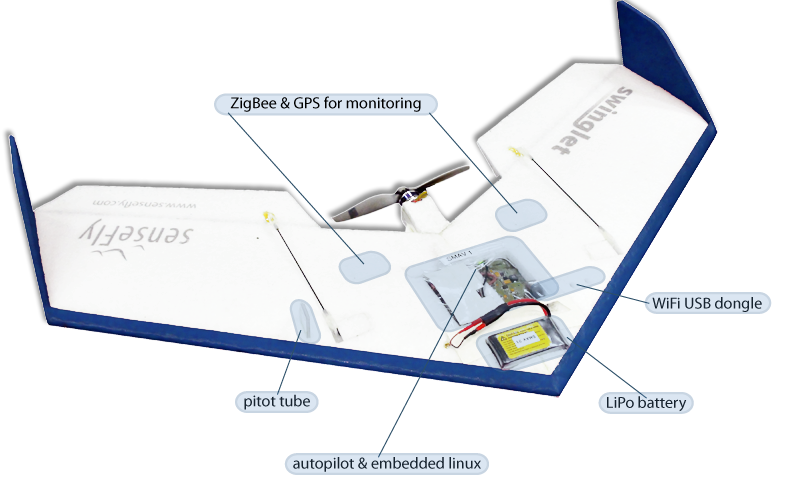
Flying Robots were specifically designed for safe, inexpensive and fast prototyping of aerial swarm experiments.
They are light weight (420 g, 80 cm wingspan) and built out of Expanded Polypropylene (EPP) with an electric motor mounted at the back and two control surfaces serving as elevons (combined ailerons and elevator). The robots runs on a LiPo battery and have an autonomy of 30 min. They are equipped with an autopilot for the control of altitude, airspeed and turn rate. Embedded in the autopilot is a micro-controller that runs a minimalist control strategy based on input from only 3 sensors: one gyroscope and two pressure sensors.
Swarm controllers are implemented on a Toradex Colibri PXA270 CPU board running Linux, connected to an off-the-shelf USB WiFi dongle. The output of these controllers, namely a desired turn rate, speed or altitude, is sent as control command to the autopilot.
In order to log flight trajectories, the robot is further equipped with a u-blox LEA-5H GPS module and a ZigBee (XBee PRO) transmitter.
 Swarm Algorithms
Swarm Algorithms
Designing swarm controllers is typically challenging because no obvious relationship exists between the individual robot behaviors and the emergent behavior of the entire swarm. For this reason, we turn to biology for inspiration.
In a first approach, artificial evolution is used for its potential to automatically discover simple and unthought-of robot controllers. Good evolved controllers are then reverse-engineered so as to capture the simple and efficient solutions found through evolution in hand-designed controllers that are easy to understand and can be modeled. Resulting controllers can therefore be adapted to a variety of scenarios in a predictable manner. Furthermore, they can be extended to accommodate entirely new applications. Reverse-engineered controllers demonstrate a variety of behaviors such as exploration, synchronization, area coverage and communication relay.
In a second approach, inspiration is taken from ants that can optimally deploy to search for and maintain pheromone paths leading to food sources in nature. This is analogous to the deployment and maintenance of communication pathways between rescuers using the SMAVNET.
Swarm Setup
All necessary software and hardware to perform experiments with 10 flying robots was developed in the scope of this project. To the best of our knowledge, this setup is the one with the most flying robots operating outdoors to this day.
For fast deployment of large swarms, input from the swarm operator must be reduced to a minimum during robot calibration, testing and all phases of flight (launch, swarming, landing). Therefore, robot reliability, safety and autonomy must be pushed to a maximum so that operators can easily perform experiments without safety pilots. In our setup, robots auto-calibrate and perform a self-check before being launched by the operator. Robots can be monitored and controlled though a swarm-interface running on a single computer.
The critical issue of operational safety has been addressed by light-weight, low-inertia platform design and by implementing several security features in software. Among other things, we looked at mid-air collision avoidance using local communication links and negotiation of flight altitudes between robots. By providing a risk analysis for ground impact and mid-air collisions to the Swiss Federal Office for Civil Aviation (FOCA), we obtained an official authorization for beyond-line-of-sight swarm operation at our testing site.

Picture Gallery
All pictures for the SMAVNET project can be found in high-resolution in our picture gallery.





Videos
All videos for the SMAVNET project can be found on our YouTube channel.
Related Links
- Autonomous UAV Coordination (Metron, USA)
- Distributed Robotics Laboratory (CSAIL, MIT, USA)
- Aerospace Controls Laboratory (MIT, USA)
- BEAR project (UC Berkeley, USA)
- COMETS project (University of Seville, Spain)
- Communication and Distributed Control in Multi-Agen Systems (University of Plymouth, UK)
- Research and Engineering Center for Unmanned Vehicles (University of Colorado, USA)
- Cooperative Tracking using Multiple UAVs (Cornell University, USA)
- The UltraSwarm(University of Essex, UK)
- SWARMS project (University of Pennsylvania, USA)
- WASP project (New Vectors LLC, USA)
- FlyFire project (SENSEable City Lab/ARES lab, MIT, USA)
- SFLY Project (Consortium around ETH Zurich, CH)
- Distributed Flight Array (DFA) Project (Institute for Dynamic Systems and Control, ETZ Zurich, CH)
- Suaave Project (Universities in Ulster, London, Oxford, UK)
Publications
