Self Deploying Microglider |
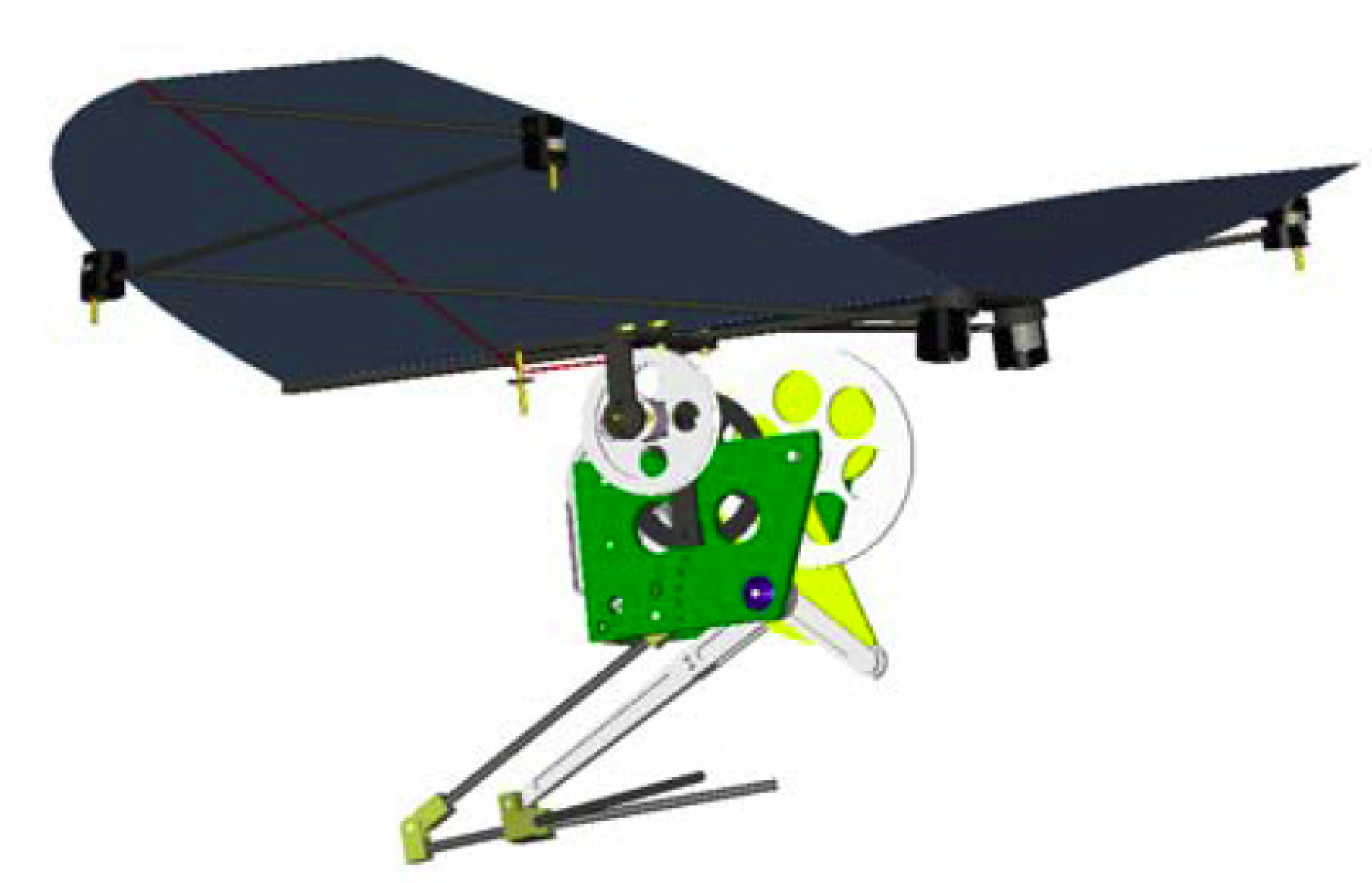
Developing a hybrid robotic vehicle capable of deploying itself into the air and perform goal directed gliding |
| Mirko Kovac |
| This project is supervised by
Prof. Dario
Floreano
and Dr.
Jean-Christophe Zufferey Videos of the thesis are available here The thesis manuscript is available here A zip file containing high resolution images/movies and the press releases is available here |




|
Gliding flight is powerful. -to overcome obstacles and travel from A to B. It can be applied in miniature robotics as a very versatile and easy to use locomotion method. In this project we aim at developing a palm sized Microglider that possesses the ability to deploy from ground or walls, to then open its wings, recover from almost every position in mid-air and perform subsequent goal directed gliding. A potential source of inspiration on how to accomplish this task efficiently is nature. In the animal kingdom, many small animals are able to get into the air by jumping, fast running or by dropping down from trees. Once air-borne, they recover and stabilize passively or actively and perform goal directed aerial descent (e.g. gliding frogs, flying geckos, gliding lizards, locusts, crickets, flying squirrels, gliding fish, gliding ants etc.). These animals do not use steady state gliding, but change their velocity and angle of attack dynamically during flight to optimize the trajectory in order to increase the gliding ratio or land on a spot. The same principles may be advantageous for small aerial robots as well. The critical issues on the path towards the realization of an efficient deploying Microglider at this scale are (i) the trade-off between passive stability, maneuverability and maximal gliding ratio, (ii) the low Reynolds number (<10'000) that leads to increased influence of boundary layer effects and renders the applicability of the conventional and well known large scale aerodynamics impossible and (iii) the control of the unsteady dynamics during recovery and flight. The work in progress addresses these aspects. Embedded mechanisms for autonomous deployment from ground or walls into the air will be considered at the next stage. |

|
|
|
|
||
|---|---|---|---|---|
|
Flying Lizards can glide up to 100m distances e.g. between trees. Their gliding membrane is supported on elongated ribs. |
Flying Gecko. These lizards have small flaps of skin along their limbs, torso, tail, and head that catch the air and enable them to glide (flying frogs use the same principle). |
Flying Fish, there are over 50 species of fish that glide over the surface of sea, usually for up to 30-50m. |
||
|
|
|
|
||
|
Sugar glider, There is a number of gliding mammals (flying phalangers) that on jumping, extend all four legs and stretche the loose but muscularly controlled folds of skin for controlled gliding. |
|
Gliding Ant, certain species of ants have a morphology that allows them for controlled gliding when they jump off trees. |
|
Flying Snakes can flatten their body for gliding. Some species can perform excellent glides of up to more than 100m with direction and altitude control. |
|
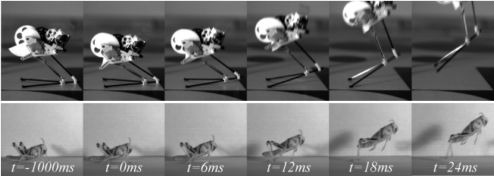
In nature, many animals are able to jump,
upright themselves after landing and jump again. This allows them to
move in unstructured and rough terrain. Based on our previously
presented 7g jumping robot, we consider various mechanisms allowing it
to recover and upright after landing and jump again. After a weighted
evaluation of these different solutions, we present a spherical system
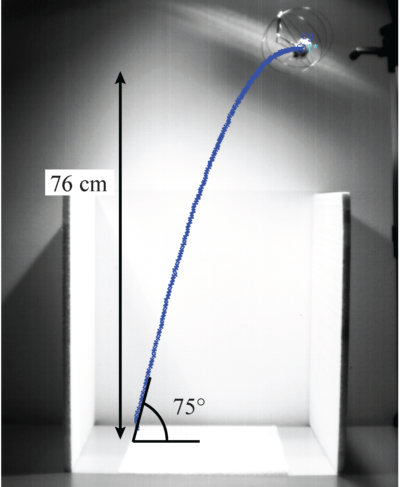
with a mass of 9.8g and a diameter of 12cm that is able to jump,
upright itself after landing and jump again. In order to do so
autonomously, it has a control unit and sensors to detect its
orientation and spring charging state. With its current configuration
it can overcome obstacles of 76cm at a take-off angle of 75degree.
|
Autonomous 9.8g jumping robot prototype capable of overcoming obstacle of up to 76cm height, upright by itself and jump again. |
|
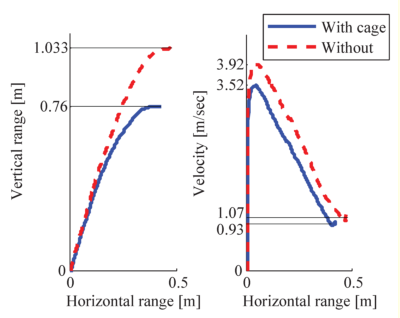
Adding additional capabilities to the robot is always connected to a cost. It is important to consider these costs carefully and decide based on a cost analysis if it is necessary to add a capabiliy for a given application or not. Here adding the cage and electronics which allows to protect the structure on landing and passive uprighting on landing decreased the jumping height by 24.4%. This addition however is crucial to be able to move autonomously in rough terrain.
|
The biological inspiration is conceptual and on the level of biomechanical principles. Compared to the desert locust, we use the same design princples to yield very powerful jumps. These principles can be summarized as (i) being as light weight as possible, (ii) using a catapult jump, (iii) using a four bar mechanism for the legs, (iv) slowly charging an elastic element and releasing its energy using a click mechanism and finally (v) jumping without the need to control the attidute, protect the mechanism in a cage structure and upright on landing to jump again.
It can jump a height of up to 76cm at a take-off angle of 75degrees. The take-off angle, jumping height and ground force profile can be adjusted, depending on the environment the robot is moving in. |
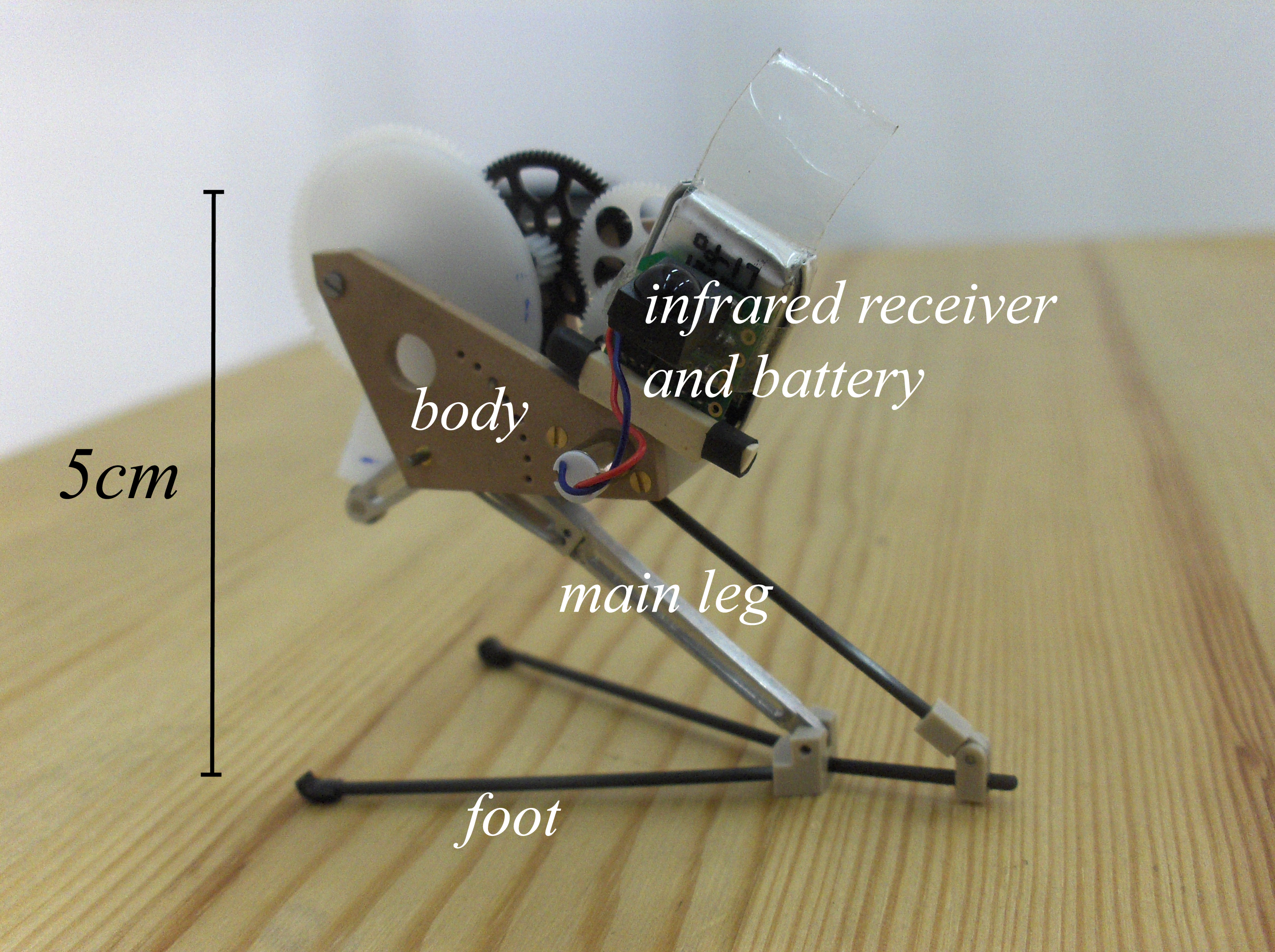
A Miniature Jumping Robot with Self-Recovery Capabilities
|
Jumping can be a very efficient mode of locomotion
for small robots to overcome large obstacles and travel in
natural, rough terrain. As the second step towards the
realization of the the Self Deploying Microglider, we present the
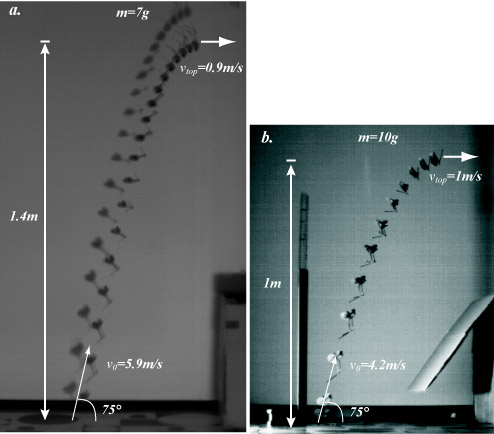
development and characterization of a novel 5cm, 7g jumping robot. It
can jump obstacles as high as more than 24 times its own size
and outperforms existing jumping robots with respect to jump height per
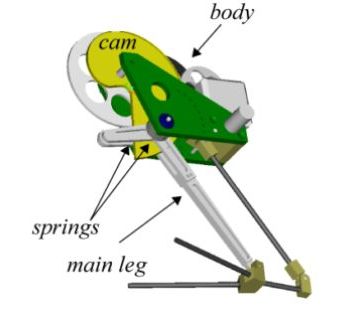
weight and jump height per size. It employs elastic elements in a four
bar linkage leg system to allow for very powerful jumps and adjustment
of jumping force, take off angle and force profile during the
acceleration phase.
|
7g jumping mechanism prototype capable of
overcoming obstacle |
|
|
|
|
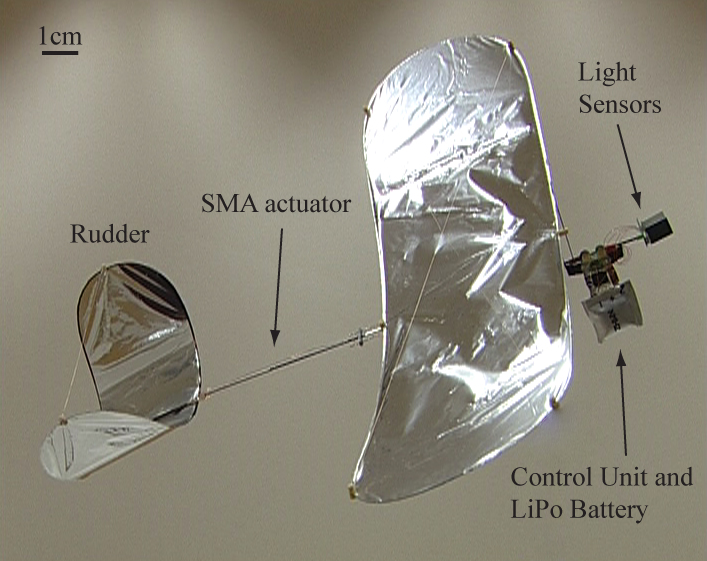
As a first step towards
the exploration of gliding as an alternative or complementary
locomotion principle in miniature robotics, we developed a 1.5g
ultra light weight microglider. It is equipped with sensors
and electronics to achieve phototaxis (flying towards
the light), which can be seen as a minimal level of control autonomy.
To characterize autonomous operation of this robot, we developed an
experimental setup consisting of a launching device and a light source
positioned 1m below and 4m away with varying angles with respect to the
launching direction. Statistical analysis of 36 autonomous flights
indicate its flight and phototaxis efficiency.
|
1.5g SMA-actuated microglider capable of
autonomous |
|
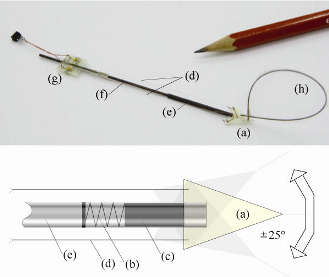
0.2g SMA actuator, (a) horn, (b) spring, (c) piston, (d) SMA
wire, (e) steel tube, (f) carbon fuselage, (g) frame with electrical
interface to Electronic Board, (h) rudder. |
In order to obtain efficient gliding distances with small scale systems, special care has to be taken to achieve very low weight because the lift to drag ratio is known to naturally decrease with size, due to increasing viscous and boundary layer effects. To achieve low weight and low power consumption, while maintaining an acceptable level of complexity allowing for fast prototyping, we opted for a relatively new kind of steering system. We developed a 0.2g Shape Memory Alloy (SMA) actuator (also called 'Artificial Muscles') that is harmoniously integrated into the structure of the microglider and allows for direct control of the rudder. |
Journal PapersKovac, M., Germann, J.M., Hürzeler, C., Siegwart, R. and
Floreano, D. (2010) A Perching Mechanism for Micro Aerial Vehicles.
Journal of Micro-Nano Mechatronics. To appear. [detailed record] [pdf]
[bibtex] Conference PapersKovac,
M., Schlegel,
M., Zufferey,
J.-C. and Floreano,
D. (2009) A Miniature Jumping Robot with Self-Recovery
Capabilities. . To appear. [detailed record] [bibtex] Kovac, M., Fuchs, M., Guignard, A., Zufferey, J.-C. and Floreano, D. (2008) A miniature 7g jumping robot. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA'2008), pp. 373 - 378. [detailed record] [pdf] [bibtex] Kovac, M., Zufferey, J.-C. and Floreano, D. (2008) Towards the Self Deploying Microglider, a biomimetic jumping and gliding robot. Proceedings of the 4th International Symposium on Adaptive Motion of Animals and Machines, pp. 41-42. [detailed record] [pdf] [bibtex] Kovac, M., Guignard, A., Nicoud, J.-D., Zufferey, J.-C. and Floreano, D. (2007) A 1.5g SMA-actuated Microglider looking for the Light. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA'2007), pp. 367-372. [detailed record] [pdf] [bibtex] Kovac, M., Savioz, G., Zufferey, J.-C. and Floreano, D. (2007) Towards the Self Deploying Microglider; Gliding Flight and Bioinspired Wing Folding Mechanism. Proceedings of the International Symposium on Flying Insects and Robots, pp. 61-62. [detailed record] [bibtex] Book ChaptersKovac, M., Zufferey, J.-C. and Floreano, D. (2009) Towards a self-deploying and gliding robot. in Flying Insects and Robots, Berlin : Springer, 2009. [detailed record] [bibtex] PostersKovac, M., Fuchs, M., Savioz, G., Guignard, A., Nicoud, J.-D., Zufferey, J.-C. and Floreano, D. (2007) Self Deploying Microglider. Presented at: Flying Insects and Robots Symposium, Monte Verita, Ascona, Switzerland, 12-17.8.2007. [detailed record] [bibtex] Kovac, M., Guignard, A., Nicoud, J.-D., Zufferey, J.-C. and Floreano, D. (2007) A 1.5g SMA actuated Microglider looking for the Light. Presented at: EPFL, [detailed record] [pdf] [bibtex] |
Student contributions are an important part of our research. Motivated and ambitious individuals are encouraged to have a look on our student projects section for upcoming projects or contact me directly.
A minimalist jumping and climbing robot (Manuel Schlegel, MT, WS 2009/2010)
Wing folding implementation for the Self Deploying Microglider (Wassim Hraiz and Oriol Fauria Torrent, MT, WS 2009/2010)
Wing design for the Self Deploying Microglider (Mohammadmehdi Shafizadeh Khoolenjani , ME, WS 2009/2010)
Sensor and control set for the Self Deploying Microglider (Manon Picard, MT, WS 2009/2010)
Attachment mechanism for the Self Deploying Microglider (Jürg Germann, EL, WS 2009/2010)
Spherical jumping rolling robot (Manuel Schlegel, MT, WS 2008/2009)
In flight dynamics of the Self Deploying Microglider (Cécile Grometto, IN, WS 2008/2009)
Optimization and scaling in jumping robots (Michael Schwander, EL, SS 2008)
Modelling and optimization in jumping robots (Wassim Hraiz, MT, SS 2008)
Passive wing folding mechanism for a microglider (Lydia Lostan, MT, SS 2008)
Gecko inspired climbing mechanism (Jerome Favre, MT, WS 2007/2008)
Gecko inspired climbing mechanism (Andreas Elmer, MT, WS 2007/2008)
Avian tail for Self Deploying Microglider (Joël Israël, IN, WS 2007/2008)
Solar cells for Self Deploying Microglider (Jean-Paul Fuchs, MT, WS 2007/2008)
Design of a jumping mechanism for the Self Deploying Microglider (Martin Fuchs, MT, SS 2007)
Wing folding mechanism for flying microrobots (Grégory Savioz, MT, SS 2007)
Jump to glide transition (Vasko Vitanov, MT, SS 2007)
Jumping Robots:
- Mini Whegs (Case Western Reserve University)
- Grillo Robot (Scuola Superiore Sant'Anna)
- Crawling and Jumping Soft Robot (Ritsumeikan University)
- Jumping Robot (University of Bath)
- Autonomous Jumping Microrobots (UC Berkeley)
Flying Robots:
- Harvard MicroRobotics
- UC Berkeley MicroGlider Project
- Morphing Micro Air-Land Vehicle (University of Florida and Case Western)
Climbing Robots:
- Nano Robotics Lab (Carnegie Mellon University)
- Evolutionary Biomaterials Group (Max-Planck-Institute for Metals Research)
- Stickybot (Stanford University)
Biology Projects:
Miscallaneous:
More links are to be added soon! Suggestions can be emailed here.